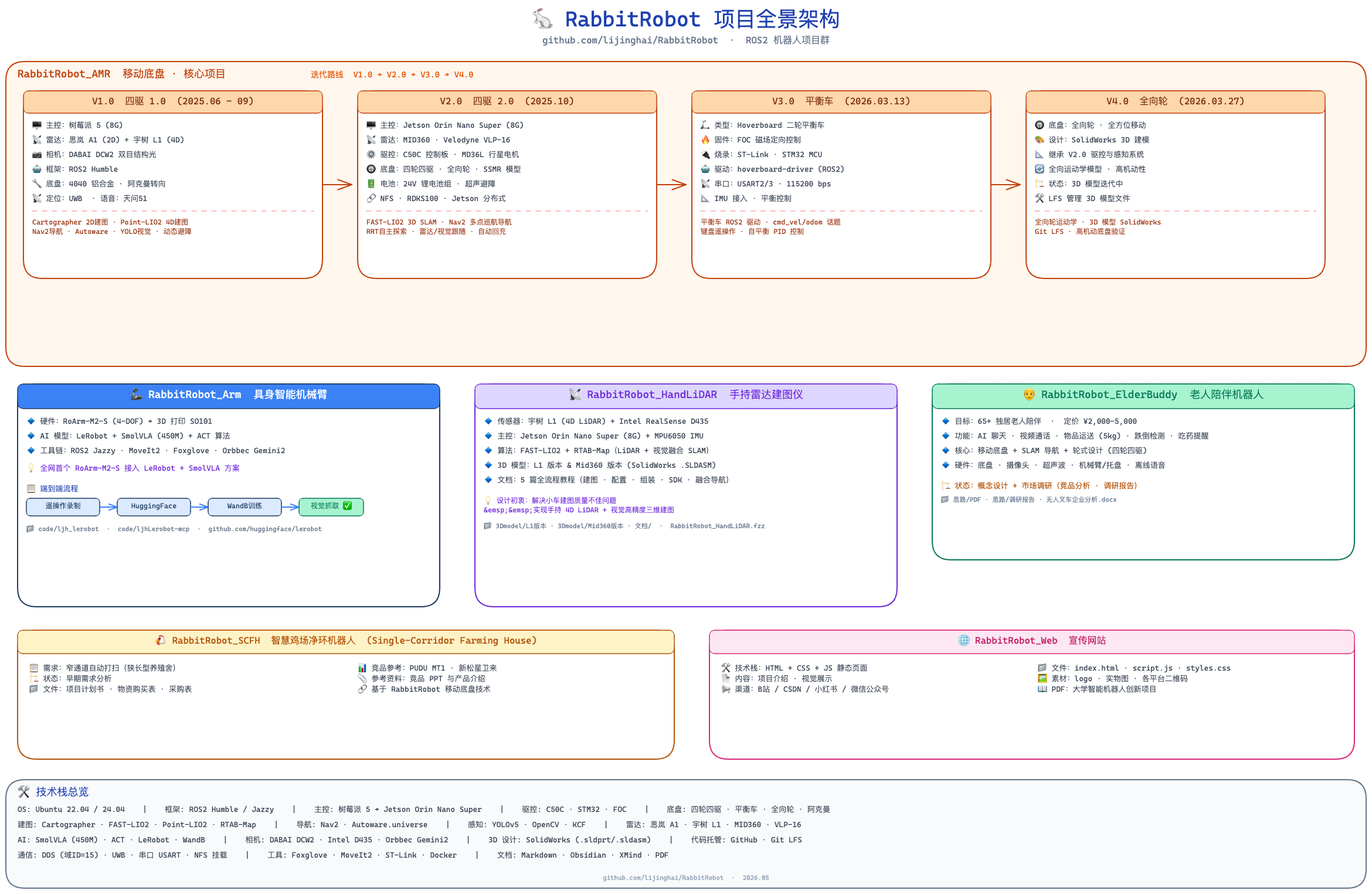
以 AMR 底盘为核心,把主控、激光雷达、深度相机、驱动、电源和 ROS2 软件链路变成可持续迭代的平台。
RabbitRobot 不是单个演示项目,而是一组围绕真实移动机器人逐步生长的工程和研究资产。它从 AMR 底盘出发,连接手持 LiDAR 建图、智慧鸡场净环场景、机械臂操作、老人陪伴机器人概念和公开网站沉淀。
这个主页采用学术项目页的表达方式:先给出问题、系统、资源与图示,再展开方法、项目矩阵、研究指标和迭代路线。它更像一篇持续更新的 project page,而不是只展示视觉气氛的作品集。